안녕하세요 유니크솔루션 유니입니다
오늘의 포스팅은 VRX 총 세 개의 모듈 중 두 번째 센서에 대해 설명하겠습니다.
자율주행에서 가장 중요한 부품인 센서!! 센서는 총 3~4가지 정도로 압축됩니다.카메라, 라이더, 레이더, UV
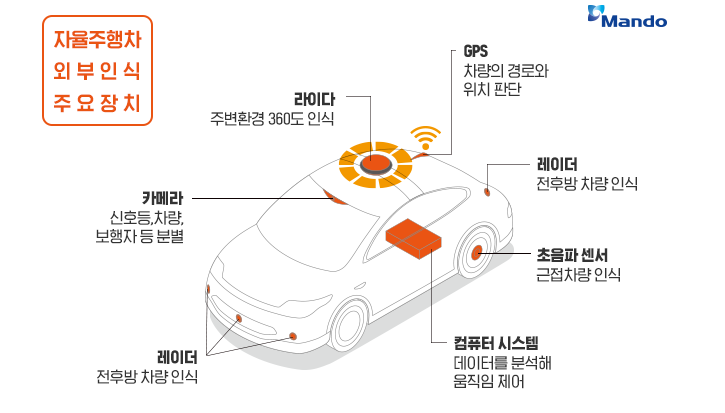
출처 : 한라 그룹 VRX 시뮬레이션에서는 각 부품들이 제대로 작동하는지 확인해야 하며, 실제로 어떤 정보를 줄 수 있는지 보여줘야 합니다.
- 카메라 (Camera)
물리 기반 카메라 모델의 렌즈와 작동을 정확한 방식으로 설계되었는지 검증이 가능합니다.카메라에 필요한 function 및 spec을 입력할 수 있고, 이에 따른 결과 데이터를 확인할 수 있습니다.
또, HiL 테스트로 카메라 ECU 검증을 실시해, Closed 루프 시뮬레이션을 실시합니다.
즉, 카메라가 올바르게 동작하는지 시뮬레이션이 가능합니다.
2. 라이다 (LiDAR)
카메라와 마찬가지로 물리반라이인 모델의 IR센서 동작을 정확한 방식으로 재현할 수 있는지 확인할 수 있습니다.또한 라이더 기술인 스캐닝, 솔리드 스테이트, 플래시 등의 기술을 매개 변수화할 수 있습니다.
3) 레이더 (Radar)
ROM 레이더 모델은 차량 레이더의 동작을 재현하게 되어 있습니다.Post-processing을 위해 실시간으로 사용 가능한 범위의 도플러 및 레이더 데이터 큐브를 제공합니다.
Closed Loop 시뮬레이션(HiL)의 다양한 센서의 Data를 입력해 HiLS를 진행할 수 있으며 실제로 어떻게 동작하는지 확인할 수 있습니다.
Camera HiL Test와 같이 다양한 센서를 VRX 시뮬레이터에 의해 사전 검증을 통해 시행착오를 줄이고 비용 절감도 가능합니다.
지난 포스팅 때도 여러 번 언급했지만 실제와 가장 비슷해야 가장 좋은 결과를 낼 수 있습니다.
자율주행 시뮬레이션에 대한 문의는 아래로 연락주세요!
Direct : 0I0-3687-8792 유니메일 : [email protected]
유니크솔루션 홈페이지 : www.uniques.co.kr