- 개요 – 자율주행자동차란 운전자의 개입없이 주변환경을 인식하고 주행상황을 스스로 판단해 차량을 제어함으로써 주어진 목적지까지 주행하는 자동차를 말한다.
- o 자율주행을 위하여 인지-판단-제어 기술요소가 요구되며 인지영역은 카메라, 레이더, 라이더 등의 센서를 사용하여 주행을 보조하고 차량을 제어하는 기술
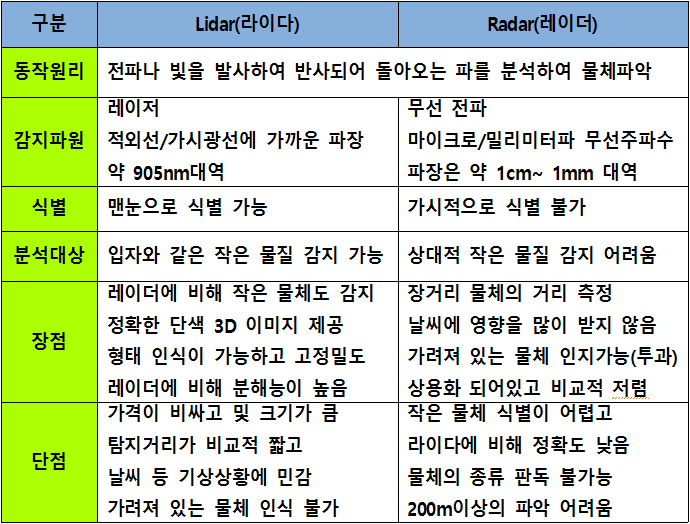
- o 레이더(RADAR, Radio Detection And Ranging)는 전파를 발사하여 돌아오는 전파의 소요시간과 주파수 편이를 측정하여 거리와 속도를 탐지
- o라이더(LIDAR, Light Detection And Ranging)는 기본원리는 레이더와 동일하나 주로 905nm 파장의 펄스레이저를 이용하여 거리정보를 획득
- o레이더는 주변 환경에 안정적으로 동작하고 라이더는 보다 정밀한 위치 정보를 획득할 수 있으나 가격 경쟁력 측면에서 보완 필요
2. 자율주행자동차의 제어구조 o 구조개념도
[그림] 자율주행시스템의 구조와 센서의 종류
3. 자율주행자동차의 요소기술
4. 레이더(Radar) 기술o 레이저의 기본원리 개념도
[그림] 레이더의 기본 구성과 동작 원리 o 레이더 센서는 전자기파를 송출하여 물체에 부딪혀 반사되는 신호를 해석, 목표물의 거리와 각도, 속도 등의 정보를 파악
o 주파수 대역은 국제표준화를 통해 상용화된 24개 일반밴드로 현재는 77개 전방 영역과 76~8개 영역을 사용하도록 명시
o 레이더 센서는 빛의 반사와 터널, 일출·일몰 등 환경적인 조건에서 카메라보다 유연하고 안개나 눈·비 등 기후적인 영향에서도 카메라보다 효과적
o 단일 칩 기반으로 저렴한 가격에 설치가 가능한 반면 물체가 사람인지 차량인지 구별이 어려워 보통 카메라와 융합 형태로 사용
5. 라이더(Lidar) 기술 o 라이더 기본 구성도
[그림] 라이더(Lidar) 기본구성 및 동작원리 o 라이더는 렌즈를 통과한 레이저 광원을 타깃으로 비추음으로써 물건까지의 거리, 방향, 속도, 온도, 물질분포 및 농도특성 등을 감지
o 라이더 센서는 광신호가 장애물 등에서 반사되어 돌아오는 빛에너지를 분석하여 차량 주변의 3차원 공간정보를 획득하는 장치
o 전통 차량용 센서인 비전 센서와 레이더 센서와 함께 자율주행을 지원하는 핵심 센서
o라이더 기술은 회전형 905mm 파장을 중심으로 발전됐으나 비, 안개 등 일부 상황에서 한계점이 드러나 1.5㎛ 파장에 대한 본격적인 개발이 진행되고 있다.
6. 기술 요소 분석
가. 거리 o 라이더와 레이더 시스템은 수 m에서 200 m이상 떨어져 있는 물체를 감지 할 수 있으며 라이더는 근거리 물체 감지가 곤란함
o 레이더는 1m 이내의 거리에서 200m 이상 떨어진 물체까지 감지할 수 있으며 거리는 단거리, 중거리, 장거리 레이더 시스템의 유형에 따라 다르다.
나공간분해능o 라이더가 두각을 나타내는 부분에서 레이저광을 조준할 수 있는 능력과 9051550의 짧은 파장 때문에 라이더의 적외선 공간분해능은 0.1° 단위까지 나눌 수 있다.
o 이는 백-엔드 프로세싱 없이도 물체의 특징을 한 장면에서 3D 묘사할 수 있다는 것.
o 반면 레이더 파장(4㎜/77 ))은 거리가 길수록 작은 특징 분석 어려움
FOV(Field of View)o수신기의 측정 각도를 나타내어 물체를 정확하게 해석하는데 필요한 핵심으로 고정형 라이더와 레이더 모두 우수한 수평 FOV(방위각)을 가지고 있는데,
o 360° 회전하는 라이더 시스템은 모든 ADAS(Advanced Driver Assistance Systems) 기술 중 가장 넓은 FOV 유지
o 라이더는 수직FOV(고도)에서 레이더보다 뛰어나며 전체적으로 방위각과 고도분해능에서 레이더보다 우위에 있다.
날씨조건 o 레이더 시스템의 가장 큰 장점 중 하나는 비, 안개, 눈에 강하다는 것
o라이더는 통상 이런 날씨 조건에서 성능이 떨어지며 1550의 적외선 파장을 이용하면 악천후로 라이더의 성능을 개선할 수 있다.
E. 주변영향 o 라이더와 카메라는 모두 주변의 빛 조건에 영향을 받기 쉽지만, 야간의 경우 라이더 시스템은 매우 높은 성능을 발휘할 수 있다.
o 레이더와 변조된 라이더 기술은 다른 센서의 간섭에 매우 강한 특징을 가지고 있다.
7. 주요 비교