쥐불놀이나 물탱크 실험은 인공위성의 공전 원리를 설명하는 데 흔히 비유된다. <사진출처=flickr> 물이 담긴 양동이에 끈을 달아 돌리면 기울었는데도 물이 쏟아지지 않습니다. 자신의 몸을 중심으로 원운동을 하면서 구심력과 원심력이 균형을 이루기 때문입니다. 인공위성이 추락하지 않는 원리를 설명할 때 과학 선생님들이 많이 사용하는 비유이기도 해요. 분명히 우주 궤도에 올려놓으면 이렇게 잘 돌아갈 텐데도 위성에는 반드시 바퀴를 달 거라고 해요. 이 바퀴는 브레이크 없이 하루 종일 최대 6000rpm까지 돌아갑니다. 우주에는 지상처럼 도로가 있어서 달릴 수 있는 것도 아닌데, 왜 인공위성은 바퀴를 돌리는 걸까요?
●인공위성 심장은 바퀴?인공위성 속의 바퀴는 보통 “반작용 휠”이라고 불립니다. 문득문득 떠오르죠? 과학시간에배운작용-반작용원리중의반작용이맞습니다. 로켓 발사도 벽을 밀었을 때 자신의 몸이 밀리는 것도 같은 원리네요. 인공위성도이반작용의힘이필요하다라는뜻이에요. 인공위성은 오로지 지구를 사랑하도록 태어났습니다. 특히 더 먼 곳의 외계 행성을 찍거나 심우주 환경을 감시할 것이 아니라면 지구를 관찰하거나 지구로 신호를 보내야 합니다. 지구에 항상 모든 신경을 써야 하는 이 운명은 안타깝게도 바람 앞의 촛불처럼 매일 흔들리고 있습니다.

인공위성은 태양 복사열과 우주의 힘에 따라 끊임없이 흔들린다. <이미지 출처=en.mercopress.com> 인공위성은 피 단신, 거대한 태양이 내뿜는 복사열을 온몸으로 받아야 합니다. 지구는 완벽한 구형이 아니며 돌고 보면 중력(구심력)도 흔들립니다. 지구만 바라보고 가만히 있으면 되는데 이런 힘듦 때문에 흔들리는 거죠. 흔들리면 영상은 흐릿하고 신호는 불규칙하잖아요. 자세가 흔들린 만큼 어긋난 만큼 끊임없이 원래 자세로 돌아가야 5년, 10년 지구를 바라보는 미션을 성공시킬 수 있습니다.
다행히 인공위성에 의한 수많은 센서(가속도, 각속도 센서, 별 센서, 태양 센서 등)들이 이를 알게 됩니다. 그리고 센서와 연결되어 있는 컴퓨터가 작동한 만큼 자세를 취하도록 명령을 내립니다. 해당 명령을 스스로 수행하는 것이 앞서 언급한 반작용 휠입니다. 인공위성을 원래대로 돌리려면 반작용 운동량을 제어해야 합니다. 반작용/모멘텀휠(Reaction/Momentum Wheel)이라고도 부르는 이유이기도 합니다. 잠시 쉴 수도 없어요. 휠이 멈추면 휠이 제어하는 힘이 없어지고 자세가 어긋납니다. 처음 정해진 자세를 유지하고 다시 자세를 바꿀 때는 속도만 보정하여 제어합니다. 즉, 힘의 방향이 다른 각각의 휠이 마치 힘겨루기 하듯이 균형을 유지하다가 어떤 휠이 고장으로 멈추면 힘의 균형이 무너져 자세가 바뀌는 것입니다. 이런 경우는 여분의 휠을 작동시켜 다시 균형을 유지할 수 있게 됩니다. 그래서 반작용 휠은 심장처럼 한 번 돌기 시작하면 계속 달려야 합니다. 당연히 휠이 3개 이상 지속되지 않는 경우 추력기도 사용할 수 없는 경우는 위성의 수명이 다 되는군요.
▶반작용 휠의 떨림을 억제하는 비결이 궁금하다면?https://blog.naver.com/karipr/221660819113
바퀴는 기본 4개 장착 어디에?

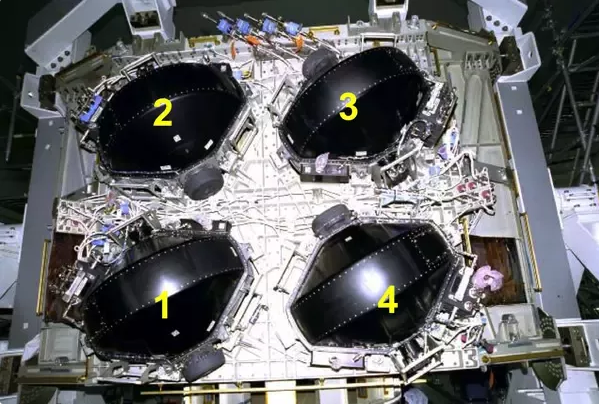
인공위성 내부에 서로 다른 축으로 설치된 반작용 휠의 모습. <사진 출처=quora> 반작용 휠은 여러 바퀴가 힘을 합쳐 원하는 방향을 끊임없이 찾아냅니다. ‘여러 개의 바퀴’로 물음표가 그려집니다. 자동차 타이어처럼 달리는 것도 아닌데 몇 가지가 필요하다니. 우주는 3차원 공간입니다 움직일 수 있는 3개의 축(x,y,z)이 있다는 뜻입니다. 휠을 하나만 달려면 한 축밖에 제어가 안되요. 또한 다른 축의 제어가 필요하다면 그 방향에도 장착해야 합니다. 최소 3개는 필요한 것으로 계산되지만 4개가 기본이고 5, 6개를 붙이기도 합니다. 하나 더 붙이는 것은 하나가 고장 났을 때를 대비하는 것이고, 더 많이 붙이는 것은 몸집이 큰 위성은 움직이는 힘(운동량)도 더 많이 필요하기 때문입니다.
이러한 휠은 각각의 방향으로 움직이는 힘을 가집니다. 이렇게 회전 방향으로 누르는 힘을 토크라고 하는데, 다른 방향으로 장착된 3개 이상의 휠로 토크가 합쳐짐으로써 임의의 새로운 회전축이 생겨납니다. 3개 중 오른쪽 바퀴의 속도를 더 높이면 오른쪽 토크가 강해지는 것이군요. 이 바퀴의 속도를 늦추면 반대가 됩니다. 이 속도를 가지고 방향을 정해 제어합니다. 힘이 부족할 수도 있어요 커버하려고 하는 만큼 돌아가야 자세를 유지할 수 있어요 큰 위성은 더 큰 휠, 더 많은 휠을 달아야 합니다. 얼마 전 정지궤도에 오른 천리안 2B호가 5개의 반작용 휠을 사용했습니다. 인공위성은 이런 방식으로 쉬지 않고 원래 자세를 제어합니다.


최근 정지궤도에 오른 천리안 2B호 발사 전 준비 장면과 내부에 장착된 반작용 휠 사진제공=한국항공우주연구원
휠은 아무리 인공위성이라도 하단에 다는 것이 적당할 것 같은데요. 어디에 붙여도 상관없다는 거죠. 심지어 위성 안에서도 밖에서도 좋다고 합니다. 물론, 주로 본체 안쪽에 적절히 배치합니다. 이유는 먼저 운동원리를 떠올리면 이해가 돼요. 반작용 휠은 3차원의 공간에서 스스로 회전운동만 합니다. 자동차처럼 지면의 마찰력을 이용하는 것이 아니라 스스로 회전력을 갖고 있기 때문에 어디에 있든 원하는 방향으로 힘을 만들어 낼 수 있습니다. 물론 반작용 휠의 떨림에 의한 영상 품질의 영향을 분석하고, 최적의 위치를 선택하는 것이 가장 효율적이겠지요.
인공위성의 수명을 연장하는 반작용 휠=반작용 휠은 인공위성의 연료를 절약하는 역할을 합니다. 아마 인공위성의 모든 기동을 추력기로 한다면 초기 인공위성처럼 수명이 1년을 넘지 않을지도 모릅니다. 자세를 정돈하는 또 다른 부품인 추력기는 단지 위성이 실은 연료가 있을 때만 의미가 있습니다. 발사된 후 정확한 궤도 조정을 할 때 최대의 연료를 소비하면서 추력기를 사용합니다. 역시 움직이려고 하는 반대 방향으로 로켓처럼 가스를 내뿜어 운동을 만드는 방법입니다. 이 밖에도 큰 위성일수록 휠만으로 커버할 수 있는 운동량에 제한이 있어 일정 기간마다 추력기로 반작용 휠의 운동량을 조절해야 합니다.천리안 위성은 하루에 한두 번 수행하며 아리랑 위성은 추력기 대신 자기장 토커라는 장치로 반작용 휠 운동량을 임무가 없는 시간에 수시로 조정하고 있다.
반면 반작용 휠은 우주의 청정에너지만으로 구동합니다. 항상 태양을 바라보도록 설계된 태양전지판을 통해 전력을 저장하고, 그렇게 저장된 에너지를 이용해 휠을 끊임없이 돌립니다. 보통 30~35cm에 달하는 큰 바퀴 4개를 빠르면 1분에 6,000번까지 쉬지 않고 돌아가는 에너지를 공짜로 주는데, 그렇게 큰 기동이 아니면 대부분 휠을 이용해서 자세 제어를 하는 것이 위성 수명을 늘릴 수 있는 기술입니다.
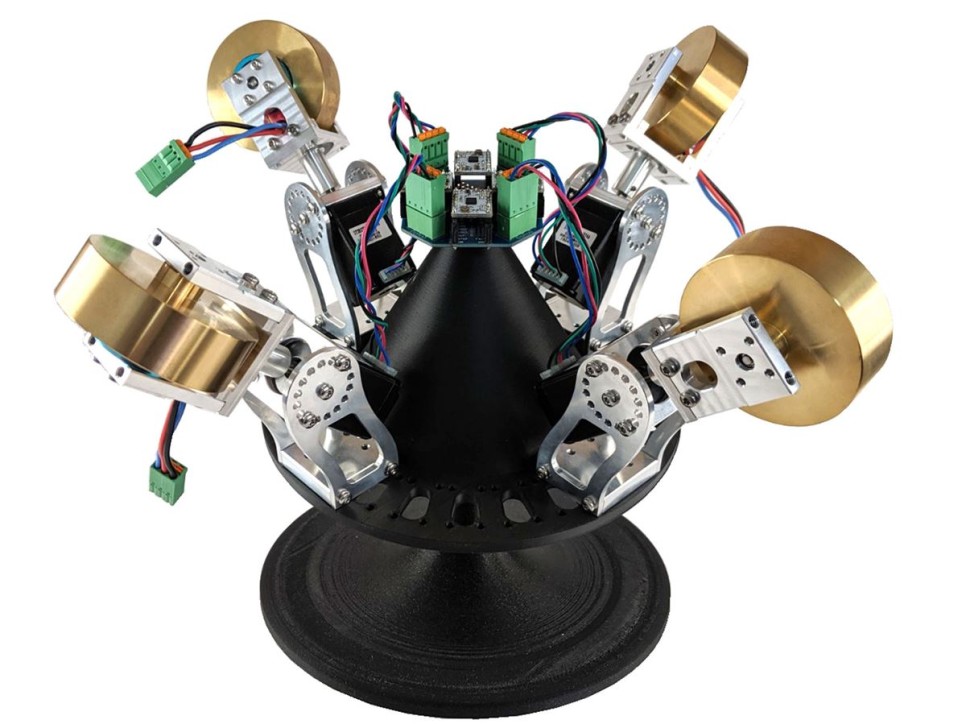
반작용 휠의 대안으로 떠오르는 CMG. 반작용 휠이 속도를 변경해 자세 제어를 하는 반면 CMG는 각 휠의 방향을 바꿔 자세를 제어할 수 있다. <사진출처=gyroscope.com>
반작용 휠의 약점이라면 순간적으로 큰 힘을 내는 것은 무리가 있다는 것이군요. 이를 보완하는 시도도 이루어지고 있습니다. 정지궤도위성의 경우 큰 기동이 필요 없지만 특정 지역에서 촬영을 자주 해야 하는 저궤도위성은 아주 빠르게 자세를 바꿔야 할 때가 많을 것입니다. 이 때, 장착할 수 있는 것이 CMG(Control Moment Gyro, 제어 모먼트 자이로)라고 하는 부품입니다. 이름 그대로라면 순간적으로 회전을 제어한다는 뜻입니다. 돌고 있는 휠의 회전축을 흔들면 직각으로 토크가 발행됩니다.
팽이를 떠올려볼까요? 팽이가 돌다가 회전이 줄어들면 넘어져요. 이때 팽이는 넘어지는 방향으로 수직으로 넘어지지 않도록 하는 힘을 발휘합니다. 팽이가 바로 쓰러지지 않고 기우뚱거리면서 잠시 회전 운동을 계속하는 현상을 볼 수 있네요. 이처럼 팽이의 회전축이 중력에 의해 쓰러질 때 저항하는 새로운 힘(토크)이 발생하는데, 이 힘을 내는 쪽에 CMG를 붙이면 빠른 기동이 가능하다는 원리입니다. 반작용 휠에 비해 CMG에서 생성되는 토크는 비교적 매우 큰 값을 얻을 수 있다고 합니다. 곧 우리 아리랑위성 7호가 우주로 가면 CMG를 달고 올라가는 국내 최초의 위성이 될 겁니다. 위성도 돌고 바퀴도 돌고 임무 내내 쉬지 않고 지구를 보고 있는 인공위성에게 다시 한 번 인사를!
기획제작 : 항공우주에디터 이종원 감수 : 위성기술연구부 박영은 박사